
Glowworm Swarm Optimization
GSO with obstacle avoidance
Earlier, we had considered robots to be point masses, that is, a robot did not perceive other robots as obstacles and were assumed to move through each other. We have shown the algorithm to work well with such an assumption. While this approximation helps us to assess the performance of the algorithm under idealistic conditions, it raises concerns about the algorithm's performance when implemented on real robots. In order to evaluate the algorithm's performance when the above assumption is relaxed, we studied the performance of the algorithm after introducing obstacle avoidance between glowworms.
The obstacle avoidance technique introduced utilizes gyroscopic forces. The use of gyroscopic forces is known to prevent grid lock situations, encountered in multi agent systems using potential function based approaches. In the gyroscopic approach, whenever a glowworm's path comes within the obstacle avoidance radius d of another glowworm, it takes a step in the perpendicular direction. This may be explained using Figure 1, where we assume B to be a glowworm with a lower luciferin value than A.
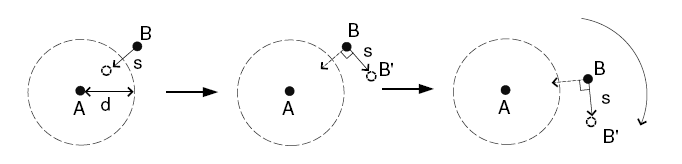
Figure 1: Obstacle avoidance in glowworms
The glowworm B, which is in chemotactic mode, takes a step toward A according to the GSO algorithm. As taking this step takes B closer to A than the avoidance distance d, obstacle avoidance forces it to take a step in the direction perpendicular to the one suggested by the algorithm. In the next instant the suggested path is again toward A, and obstacle avoidance forces it to take the perpendicular path. Continuing in this way B can be seen to circle A. This circling behavior is seen to add an explorative component to the algorithm, this explorative behavior is later utilized for source localization without anemotaxis.
After the introduction of obstacle avoidance, the convergence is seen to be delayed considerably. This delay in convergence is caused by an hindrance to anemotaxis. The glowworm with the highest luciferin value attracts all other glowworms toward it. Thus, a cluster is formed around this glowworm. As the glowworm with the highest luciferin has no neighbors, it enters the anemotactic mode and tries to move upwind. The presence of glowworms around it prevents this motion. In Figure 2, the glowworm L has the highest luciferin value and hence enters the anemotactic mode and tries to move upwind, but as that would take it too close to A and B, obstacle avoidance forces it to move in the perpendicular direction, thus hindering anemotaxis and delaying convergence.
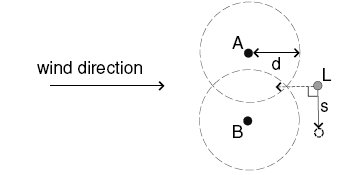
Figure 2: Anemotactic motion hindered by obstacle avoidance.
This problem can be solved by introducing obstacle avoidance maneuvers at a larger distance, say Nl times d, the normal obstacle avoidance distance, for the glowworm in the chemotactic mode. In Figure 1, if A is attracting B, obstacle avoidance maneuvers can be introduced in B at a distance of Nl times d from A. In case A is not the glowworm attracting B, but one merely in its path, the obstacle avoidance distance will be d. Higher values of Nl results in glowworms being spread out, thus minimizing anemotactic hindrance.
Figure 3 shows the variation of glowworm trajectory with Nl, with source at (-2; 0). All simulations assume an obstacle avoidance distance, d = 0.1 meter. For lower Nl values as in 3(a) and 3(b), the glowworms bunch up together, hindering the anemotactic motion. In 3(c) and 3(d), due to high Nl the glowworm trajectories are observed to be spread out. Hence anemotaxis is unaffected, resulting in a faster upwind progress. Convergence is observed to occur in about 250 seconds. Figure 4 shows the improvement in convergence time observed by increasing Nl. With sufficiently large Nl, the convergence time is close to that of non-obstacle avoidance simulations.
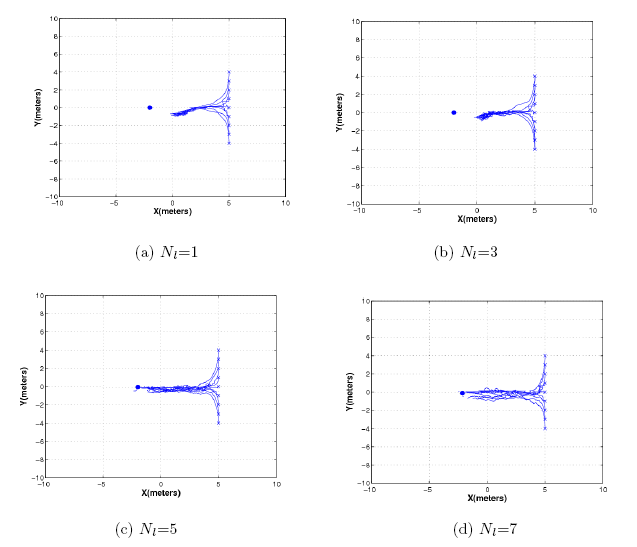
Figure 3: Glowworm trajectories after 250 seconds.
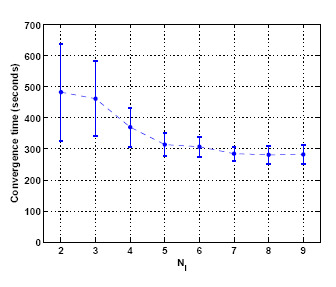
Figure 4: Convergence time variation with Nl. (with anemotaxis)
